Actuator
ROBOT MODULE
Overview
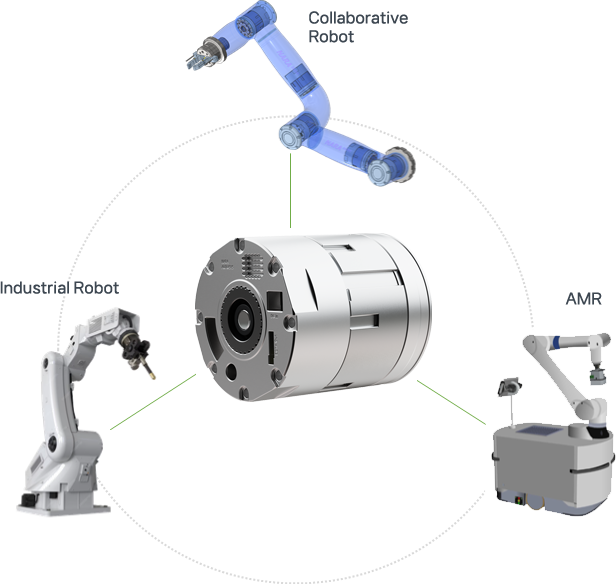
The Robot Module is a core component that drives the joints or actuators of a robot, integrating motor, gearbox, sensors, and controller into a high-performance unit.
Optimized for robot designs requiring precise control and high torque.
Robot Module Series
| Driving Module | Joint Module | |
|---|---|---|
 |
 |
|
| Category | AMR Wheel Drive Module | Robot Joint Module |
| Function | AMR Movement and Control | Robot Arm Motion Control |
| Main Operation | Continuous Rotation | Bidirectional Rotation (Precision Control, Position Holding) |
| Features | Designed for Speed, Durability, Efficiency | Designed for Precision, Torque, Responsiveness |
| Control Method | Speed Control | Position and Torque Control |
| Applications | AMR/AGV Wheels, Electric Wheelchairs, etc. | Collaborative Robots, Industrial Robots, Humanoid Robots, etc. |
Features and Components
The Robot Module is a core system to drive robot joints or actuators, composed of the following integrated components.
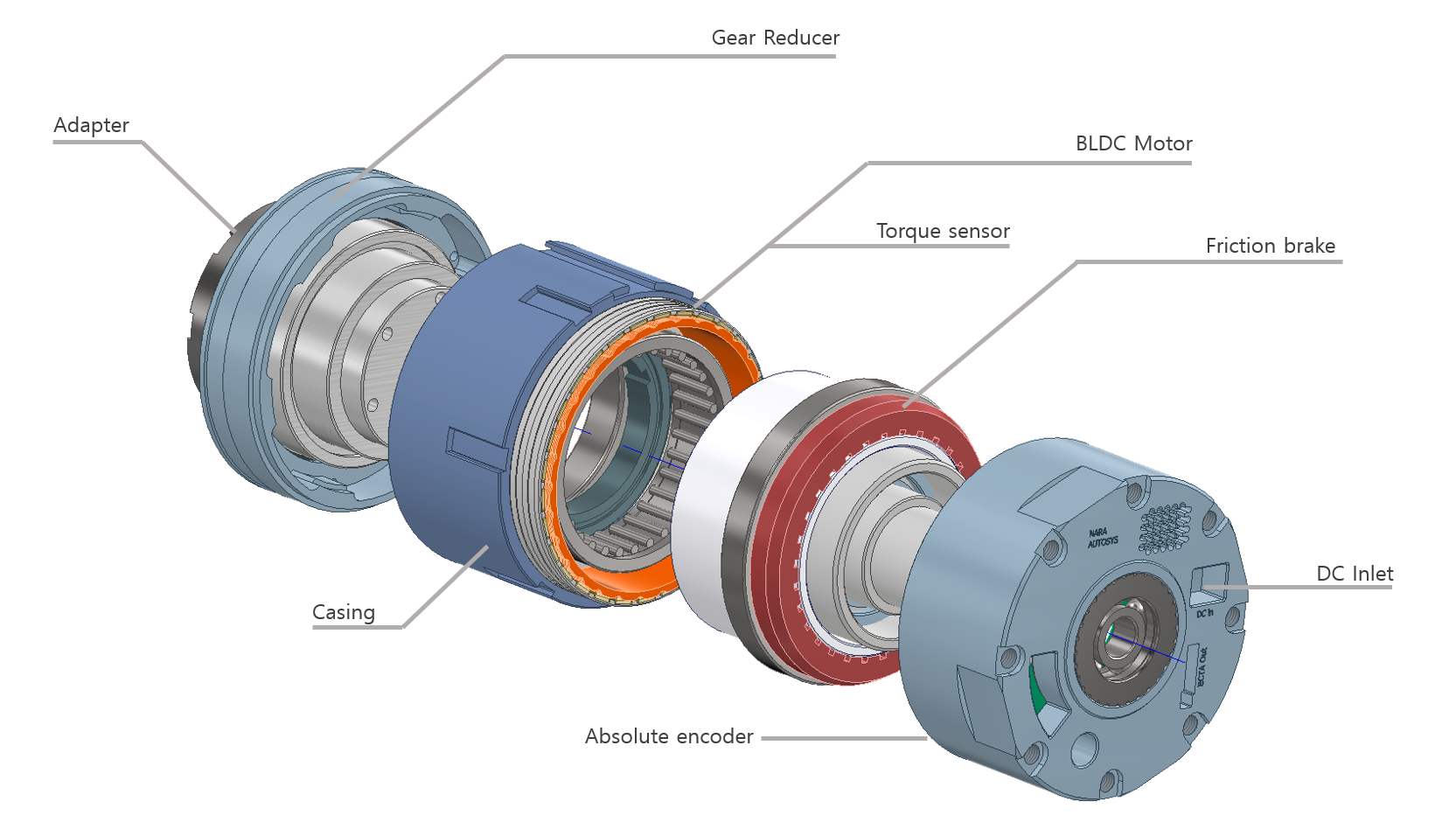
Adapter
- Spline join for precise positioning.
- Custom adapters can be designed depending on the application.
Friction Brake
- Provides safety factor margin against robot load.
- Shortened brake on/off response time.
- Optimized for pad wear, temperature effects, and residual torque.
- Prevents heat damage during emergency stop (1–2 stops).
Gear Reducer
- High durability with minimal backlash (1–5 arc-min).
- High torsional rigidity suitable for precision control.
- Bearing preload and allowance for thermal expansion.
- Reduction ratio: 1:50 ~ 1:160
Absolute Encoder
- High-resolution detection of joint absolute position (angle).
- Maintains zero position even after power restart.
- Optical type
- Resolution: 17–22 bit
- EMI shielding and zero calibration
Casing
- Made of aluminum alloy.
- Includes bearing seats, stator fixing slots, and cable channels.
- IP65 rating ensured.
- Structural rigidity vs Balancing lightweight design.
- Integrated thermal path for motor heat dissipation.
Torque Sensor
- Measures actual torque transmitted to the reducer output shaft.
- Strain gauge type
- Magnetic induction type (non-contact)
- Ensures linearity within rated torque range.
- Zero-point adjustment and calibration.
BLDC Motor
- High pole design for high torque density.
- Incorporates cooling structure.
- Precision tolerance applied to rotor concentricity.
DC Inlet
- Integrated control of DC input, encoder signals, brake control, and torque sensor output.
- Ensures harness vibration durability and optimized fastening torque.
- Waterproof function (IP65)
Inquiries
PM Noh Tae-won (nenun@naraauto.com)